Dobb·E
About Dobb·E
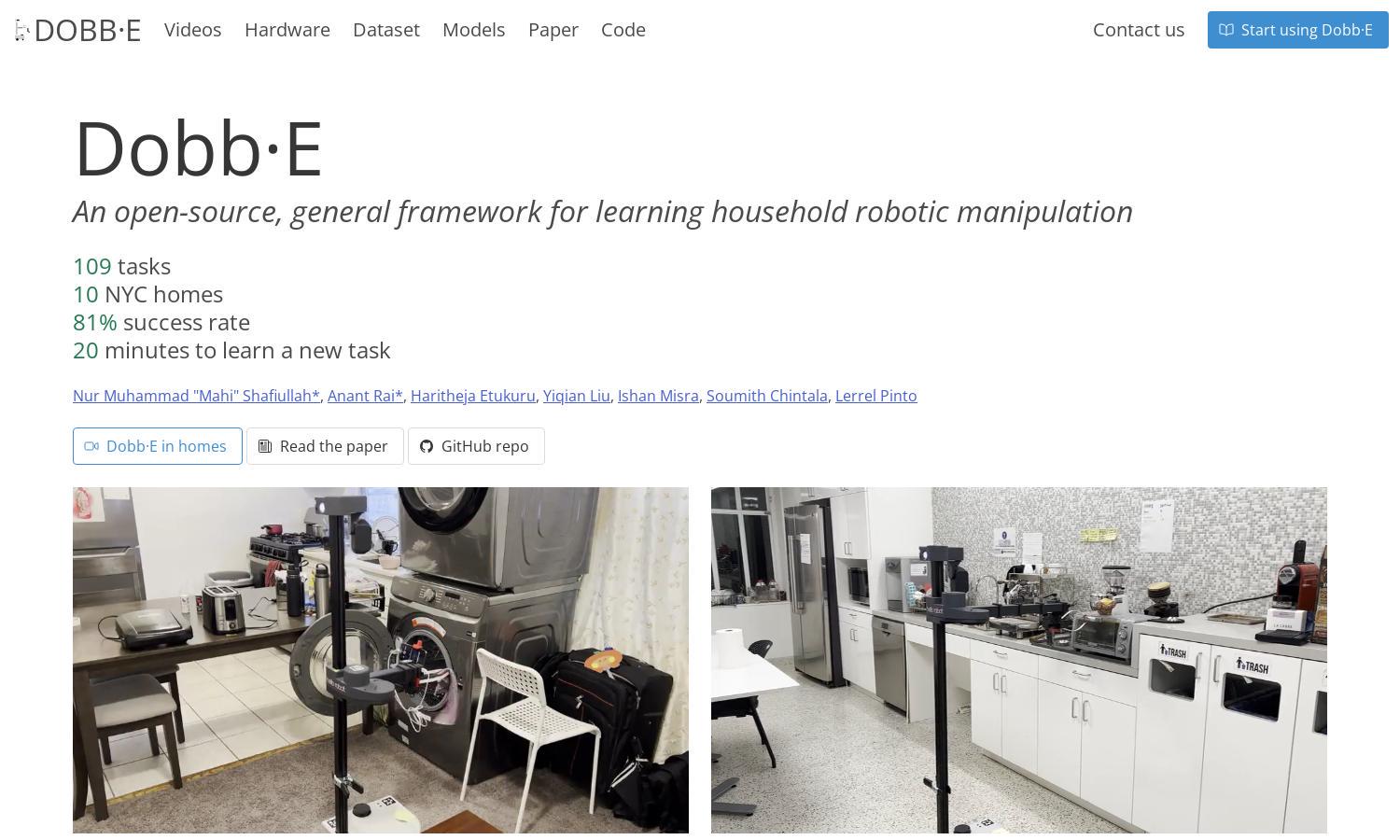
Dobb·E is a groundbreaking platform for home robotics, targeting researchers and developers. With its unique framework, Dobb·E allows robots to learn household manipulation tasks quickly and efficiently from human demonstrations, solving challenges in real-world environments and advancing domestic automation efforts.
Dobb·E offers a free open-source toolset for developers, providing access to demonstration tools, datasets, and models. Users can leverage this framework without subscription fees, enabling research and experimentation in home robotics. Upgrading skills through Dobb·E allows for innovative developments in robotic systems.
Dobb·E features a user-friendly interface that enhances navigation while accessing tools for robot learning. Its intuitive layout fosters a seamless experience, enabling users to quickly utilize resources and datasets. The design incorporates essential features to streamline the learning process in household robotics.
How Dobb·E works
Users begin by collecting demonstrations of household tasks using Dobb·E's custom tool, "The Stick." This data is then processed to create a robust dataset called Homes of New York (HoNY). Using this dataset, users can train models efficiently in just 20 minutes, allowing robots to adapt and learn from human actions effortlessly.
Key Features for Dobb·E
Imitation Learning Framework
Dobb·E's imitation learning framework enables robots to adapt to household tasks quickly, utilizing human demonstrations. By leveraging innovative technologies, this feature promotes efficiency and accuracy, allowing users to achieve a remarkable 81% success rate in task completion, revolutionizing home automation.
Demonstration Collection Tool
The Stick, Dobb·E's demonstration collection tool, is an affordable and ergonomic solution for capturing human actions. Comprising inexpensive parts, it empowers users to train robots with ease, making the process accessible to non-experts and enhancing the adaptability of robotic systems in home settings.
Home Pretrained Representations (HPR)
Home Pretrained Representations (HPR) are a significant feature of Dobb·E, providing a pre-trained model to accelerate robot learning. This unique capability allows users to initialize robot policies efficiently, enhancing performance across diverse household tasks and facilitating quicker adaptations in novel environments.
You may also like:








